Process Control / Optimization Research
Fiber Optic Monitoring of Subsea Infrastructure

Faculty: John Hedengren
The Process Research and Intelligent Systems Modeling (PRISM) group researches new methods to improve deepwater monitoring and address installation of advanced sensors on ”already deployed” risers, flowlines, trees, and other deepwater devices. The research is part of the Clear Gulf Joint-Industry Project (JIP) that forms a collboration between Astro Technology, NASA, and various oil and gas companies. This partnership utilizes the test facilities and expertise of NASA for operating in remote environments and under harsh conditions. The objective of this collaboration is to jointly develop technology that minimizes impact on the environment, improves safety, and monitors critical energy infrastructure. A new area of application is the retrofitting of existing subsea structures with fiber optic monitoring sensors installed by divers or Remotely Operated Vehicles (ROVs).
More information:
Infrastructure Monitoring
Faculty: John Hedengren
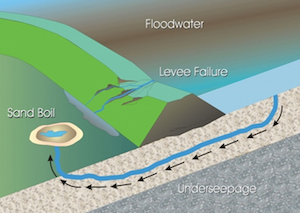
Early detection of possible anomalies and weaknesses of a civil infrastructure system is crucial to maintain the long term system integrity and to minimize possible adverse impacts to the environment. We will provide these health monitoring tools with a research plan that enables autonomous image collection with aerial and ground robots, reconstruction of infrastructure geometry and recognition of material, detection and localization of possible anomalies, and visualization of these weaknesses in an augmented reality environment to improve management. This project, through a synergistic collaboration, has the potential to transform health monitoring of earth structures that would not be possible otherwise.
More information:
Trajectory Planning of Unmanned Aerial Systems

Faculty: John Hedengren
Unmanned aerial systems may consist of multiple agents with coordinated actions. Modeling and control of the system leads to increasingly complex systems. It is desirable for each agent in the system to reach individual objectives so that the overall objective is accomplished. This problem may be posed as an optimization problem and solved with a receding horizon controller. Solving the problems with APMonitor demonstrates that complex dynamic systems can perform coordinated and optimal actions to achieve a shared objective. This work is performed in collaboration with the BYU MAGICC Lab.
More information:
Multiple Agent Control Applications
Faculty: John Hedengren
There are a number of issues associated with multiple agent control that are of interest to other control disciplines as well. For example, in chemical plants and refineries, sophisticated large-scale controllers may be more difficult to maintain than multiple agent-based controllers. Splitting the controller into multiple parts improves the ability to explain controller action, reduces development costs, and allows sub-sets to be revamped without changing the other agents.
More information: